






three thousand
Join Our Journey
Our products solve real problems with clean design and honest materials.Get exclusive deals and early access to new products.




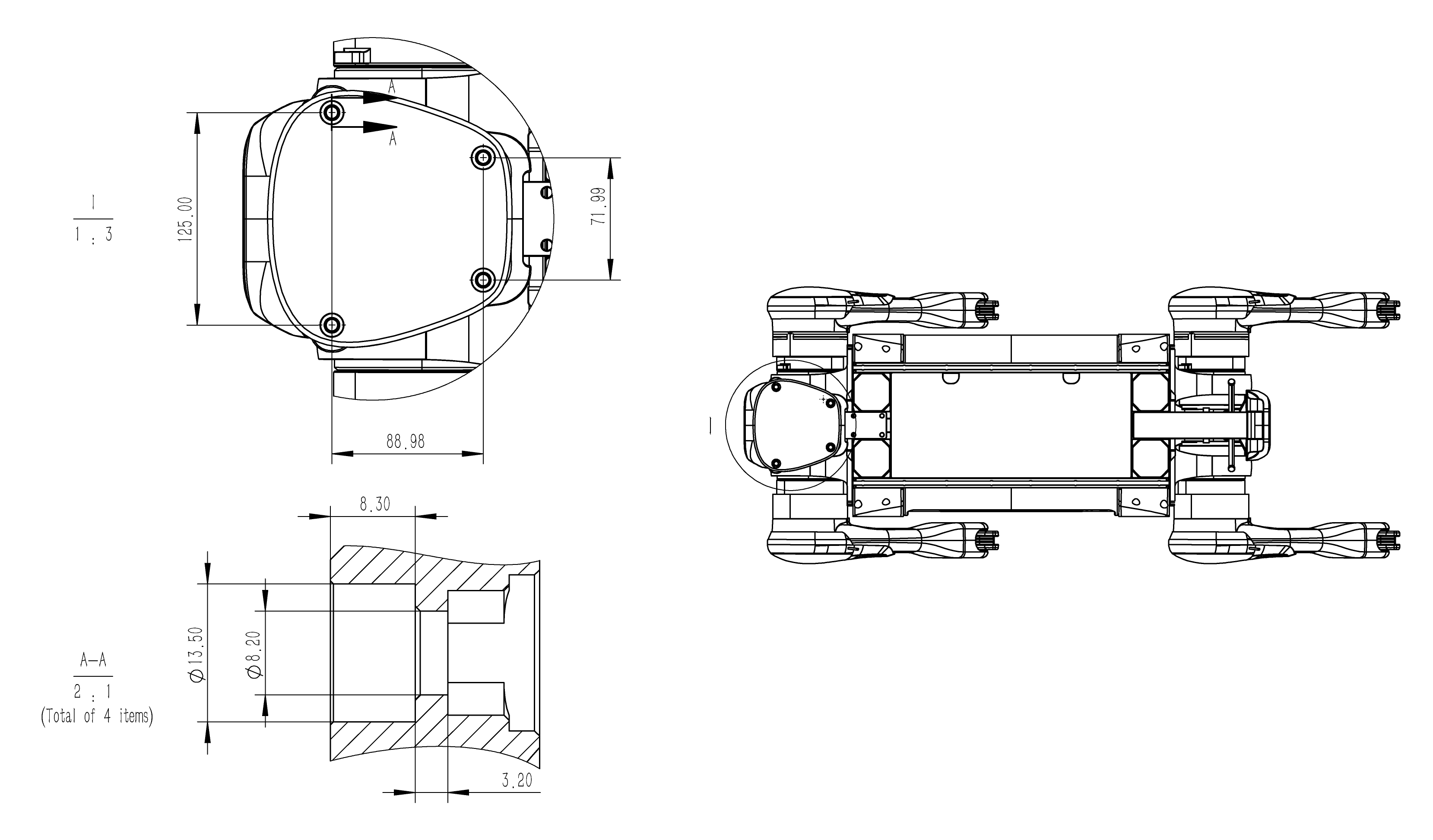
Back load installation hole map: unit: mm
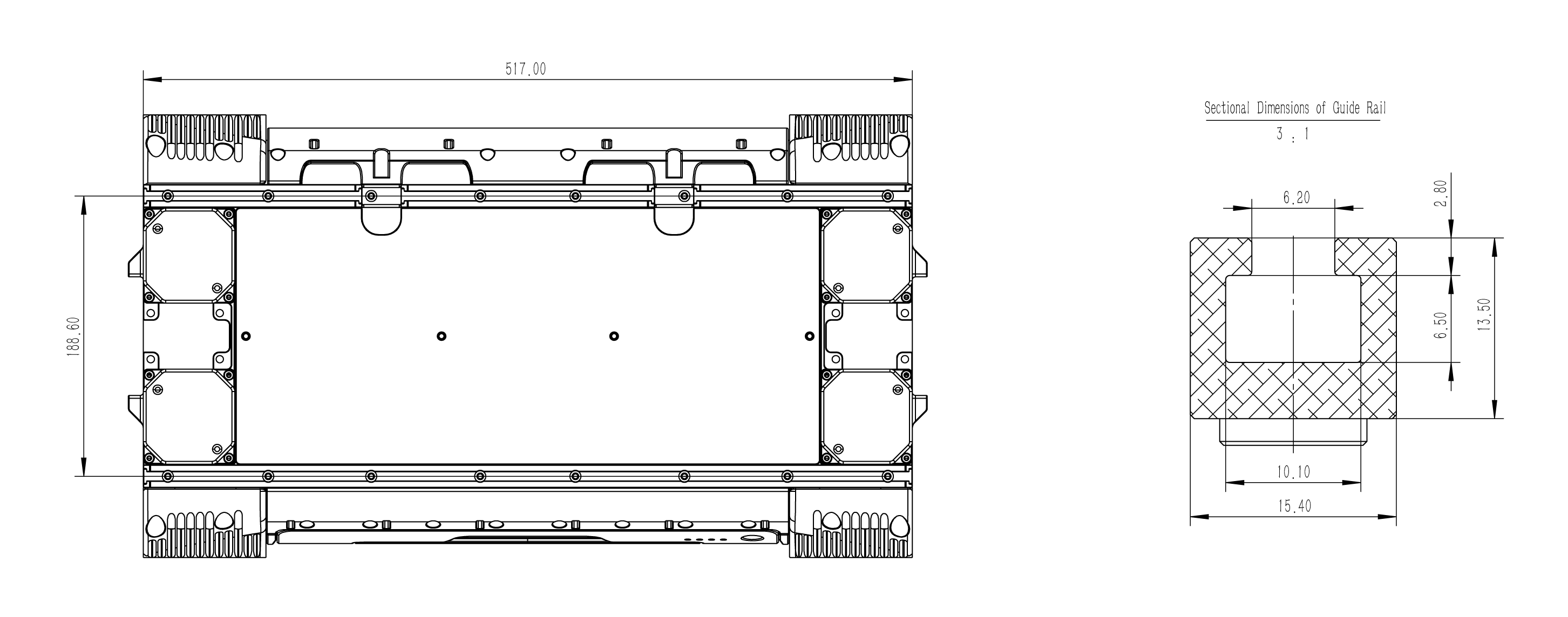
Guide rail size: unit: mm
Radar Mounting Hole Dimension Drawing: unit: mm
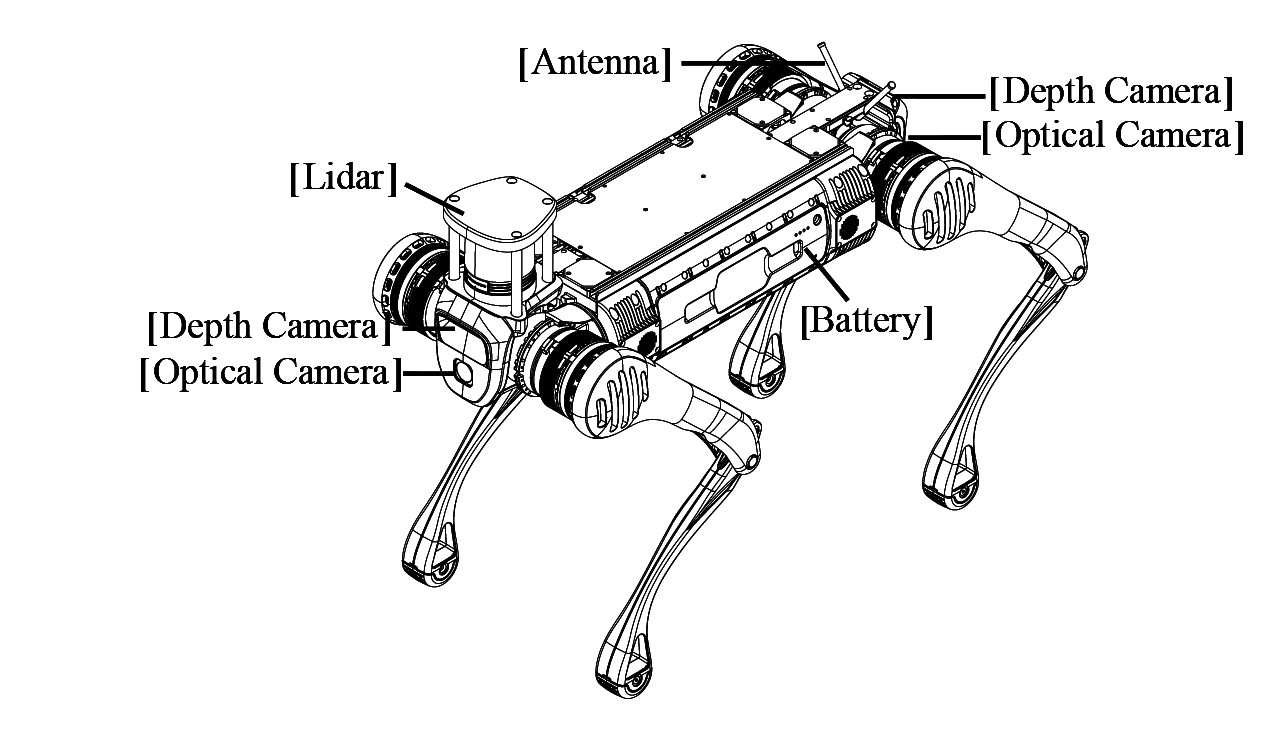
B2 is equipped with a depth camera and an optical camera in the front and rear, providing long-distance perception and strong anti-interference capabilities. It can provide high-definition image transmission and videos.
The head is equipped with a wide-angle omnidirectional LiDAR, which can recognize terrain features with high resolution.
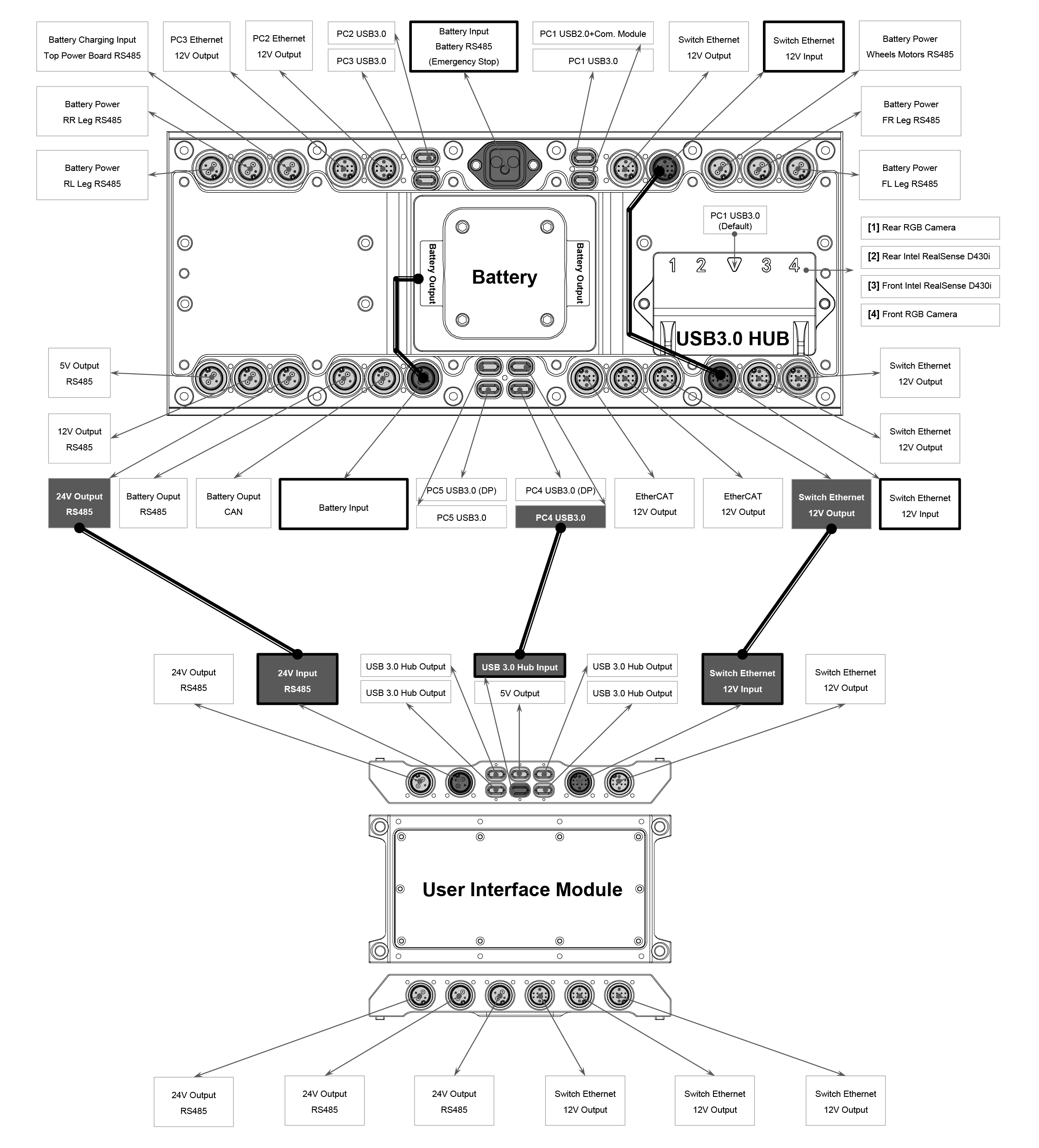
| User Interface Module Power Parameters | |
|---|---|
| USB Interface Power Parameters (TYPE-C): Note: This interface is powered from the PC processor in B2's abdomen and shares power with the TYPE-C interface of the B2 abdominal processor. |
1. Total USB output current: 3A |
| 2. Current limit per USB port: 1.5A | |
| 24V Power Interface Parameters (2+2PIN): | 1. Total 24V output rating: 10A |
| 2. Total 24V output overload protection value: 15A slow-blow fuse (one-time) |
|
| 3. Total 24V output overcurrent protection value: Trigger at 24A, reset at 16A (hiccup self-recovery) |
|
| 4. Current distribution per 24V interface: None (internal wiring is parallel, sharing one power supply) |
|
| 12V Network Interface Power Parameters (2+8PIN): Note: This interface shares power with the B2 abdominal processor. The parameters listed below are the overall internal power parameters. |
1. Total 12V output rating: 10A |
| 2. Total 12V output overload protection value: 15A slow-blow fuse (one-time) |
|
| 3. Total 12V output overcurrent protection value: Trigger at 24A, reset at 16A (hiccup self-recovery) |
|
| 4. Current distribution per 12V interface: None (internal wiring is parallel, sharing one power supply) | |
|
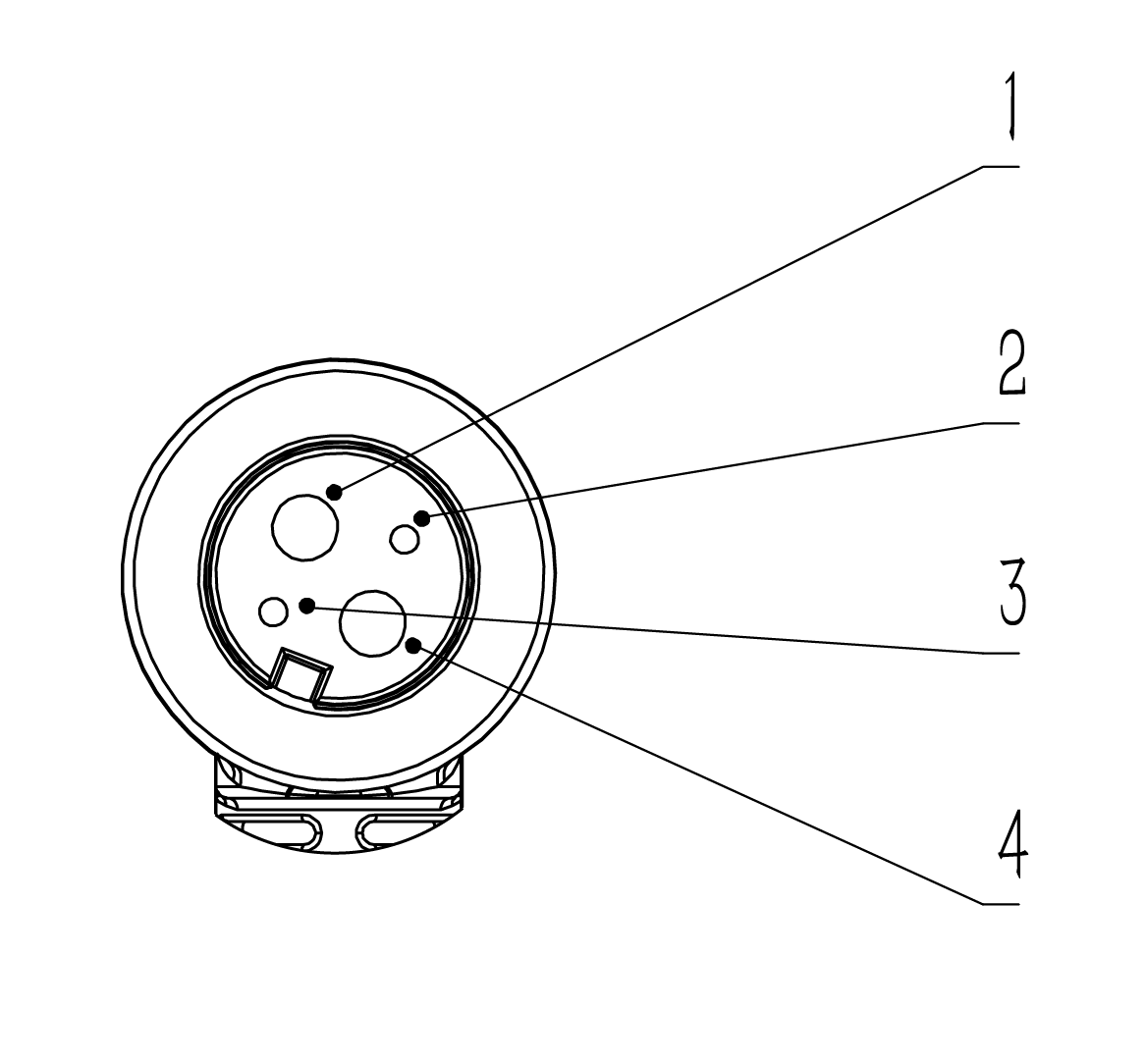
Pin
|
Colour
|
Interface Meaning
|
|---|---|---|
| 1 | Black(14AWG) | Power- |
| 2 | Red(24AWG) | 485A |
| 3 | Black(24AWG) | 485B |
| 4 | White(14AWG) | Power+ |
|
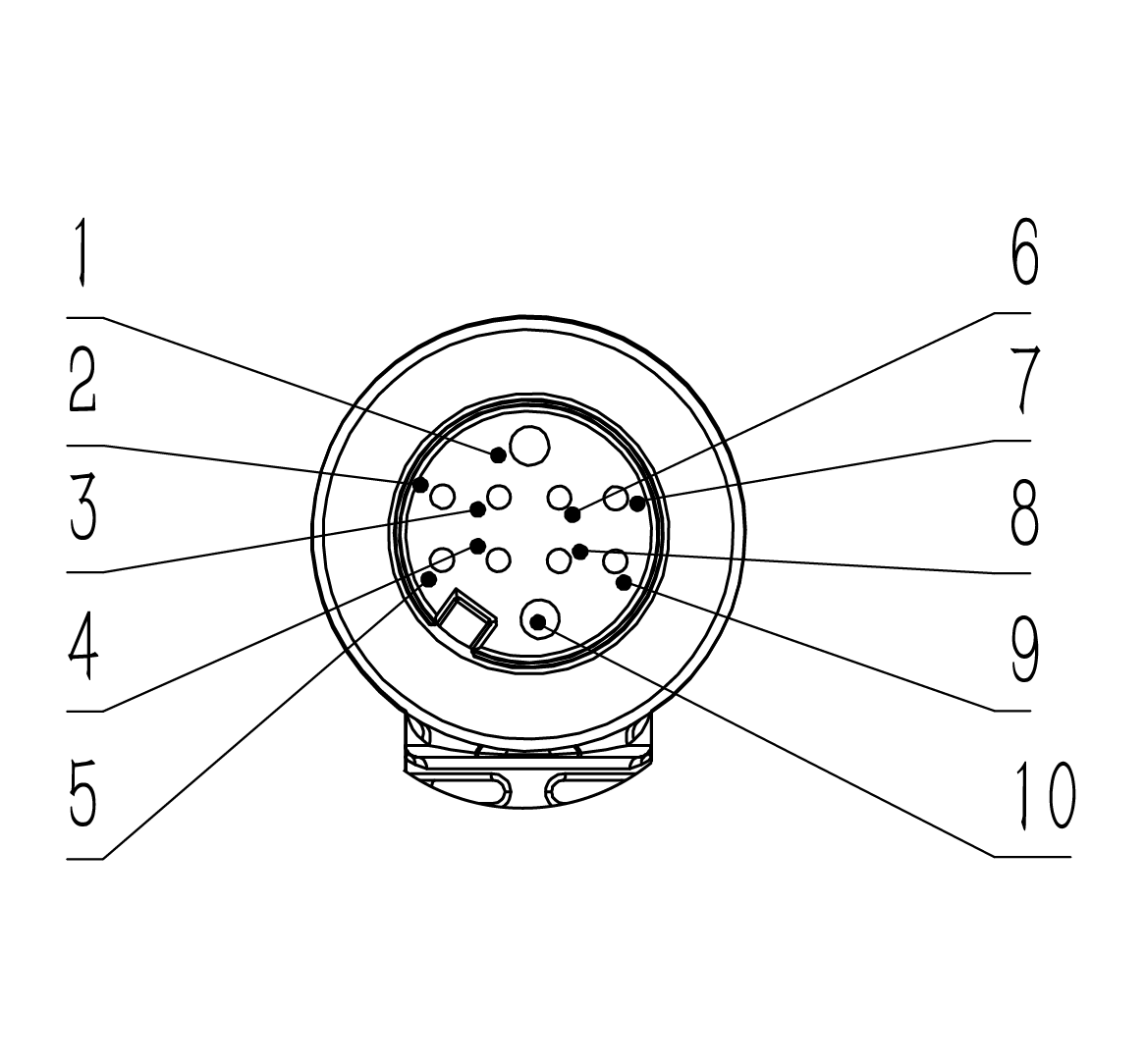
Pin
|
Colour
|
Interface Meaning
|
T568 Standard Ethernet Cable
|
|---|---|---|---|
| 1 | Black | Power- | |
| 2 | Orange | 4N | Brown |
| 3 | Purple | 4P | White Brown |
| 4 | Brown | 1P | White Orange |
| 5 | Blue | 1N | Orange |
| 6 | White | 3N | Blue |
| 7 | Green | 3P | White Blue |
| 8 | Pink | 2N | Green |
| 9 | Grey | 2P | White Green |
| 10 | Red | Power+(12V) | |
| / | Deep Blue | none | |
| / | Yellow | none |
Note:
There are 12 wires in total (8+2 configuration), among which the deep blue and yellow wires are non-functional.
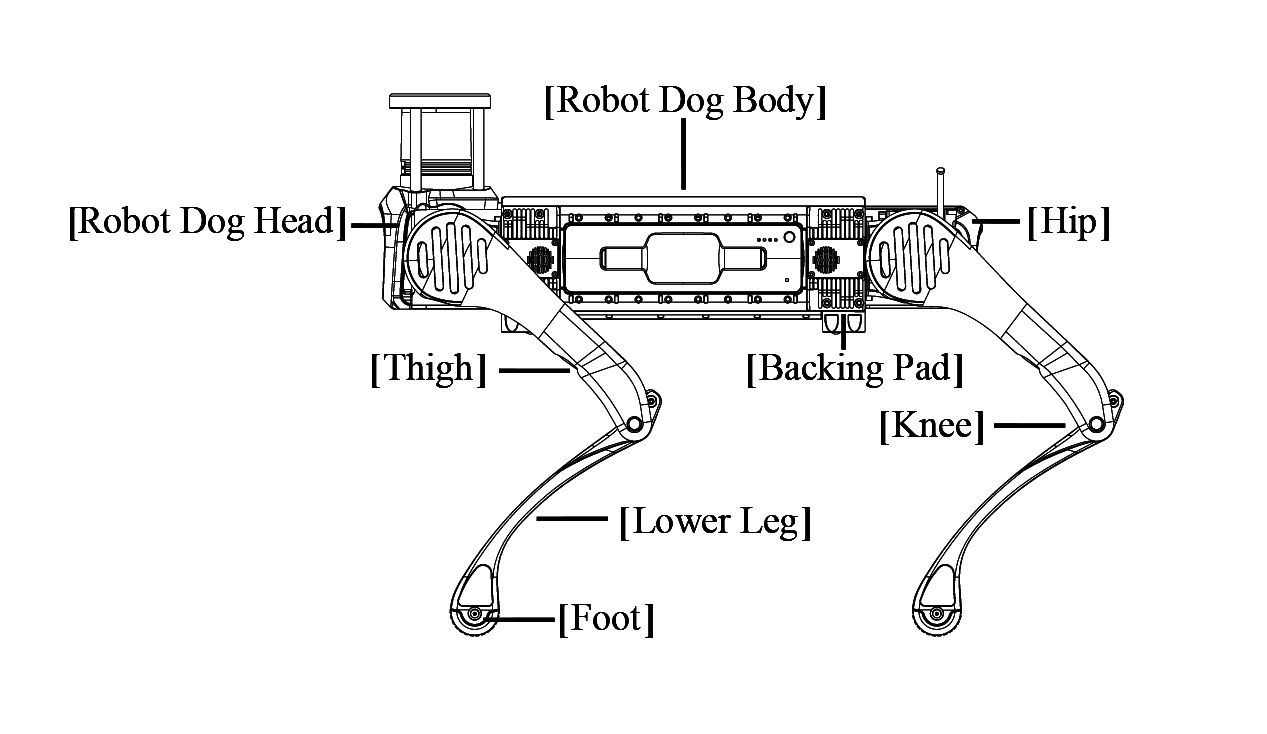
Like animals, quadruped robots have a symmetrical structure with a trunk and four limbs. The four legs are divided into two groups, front and rear, and these two groups are identical in terms of coordinate systems and joint ranges.
| Leg and Joint Numbers: |
|---|
| Leg 0: FR, front right leg |
| Leg 1: FL, front left leg |
| Leg 2: RR, rear right leg |
| Leg 3: RL, rear left leg |
| Joint 0: Hip, trunk joint |
| Joint 1: Thigh, thigh joint |
| Joint 2: Calf, calf joint |
| e.g. FR_thigh: front right leg thigh joint |
| Joint Limits: |
|---|
| Trunk joint: -0.87~0.87 |
| Thigh joint: -0.94~4.69 |
| Calf joint: -2.82~ -0.43 |
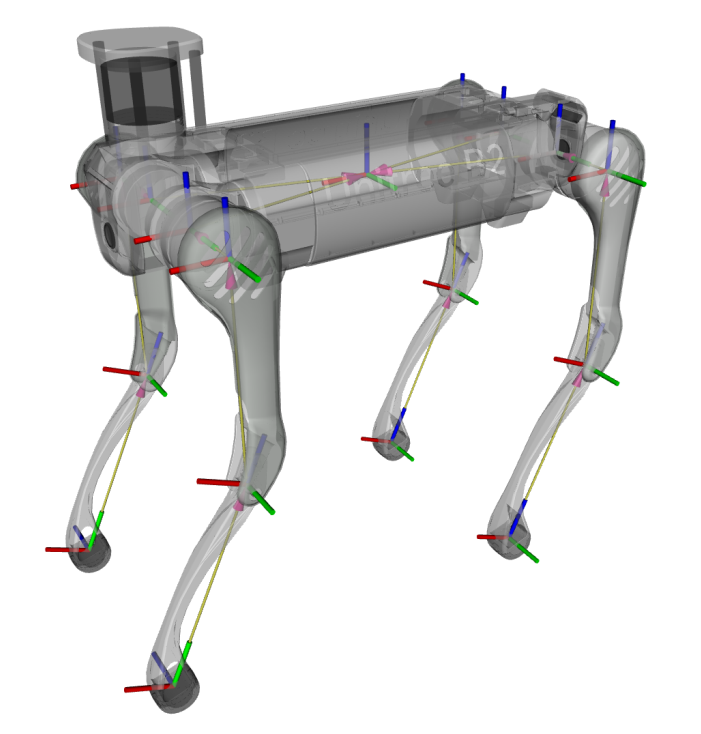
The rotation axis of the trunk joint is the x-axis, and the rotation axes of the thigh and calf joints are the y-axis, following the right-hand rule for positive rotation direction. When all the joints are at zero degrees, the coordinate systems are as shown in the above figure. The red axis represents the x-axis, the green axis represents the y-axis, and the blue axis represents the z-axis. The actual position of the calf joint cannot reach this position due to the joint limits, and it is only shown here to indicate the zero position. It can be seen that the initial postures of the coordinate systems for each joint are consistent, only differing in position and rotation axis.
| Parameter | Specification |
|---|---|
| Standing Size | 1098mm×450mm×645mm |
| Folded Size | 880mm×460mm×330mm |
| Net Weight (including battery) | Approx. 60kg |
| Degrees of Freedom | 12 |
| Maximum Speed | > 6m/s (limited for safety purposes) |
| Parameter | Specification |
|---|---|
| Operating Temperature | -20℃~55℃, under good weather conditions |
| Slope Walking Ability | > 45° |
| Maximum Step Height | 20~25cm |
| Jumping Ditch Width | 0.5~1.2m |
| Maximum Jumping Distance | > 1.6m |
| Protection Level | IP67 |
| Parameter | Specification |
|---|---|
| Battery Model | BT2-10 |
| Battery Weight | 12.2kg |
| Battery Capacity | 45Ah (2268Wh) |
| Standard Voltage | 50.4V |
| Charging Voltage | 58.8V |
| Charging Current | 10A |
| Operating Time | 4-6h |
| Charging Time | 3h 20m |
| Parameter | Specification |
|---|---|
| Control and Perception Computing Power | Standard configuration: Intel Core i5 (platform function), Intel Core i7 (user development). Optional configuration: Intel Core i7 and Nvidia Jetson Orin NX (up to 3 units). |
| Perception Sensor Configuration | 3D LiDAR ×1 + Depth Camera ×2 + Optical Camera ×2 (varies with different configurations) |
| External Interfaces | 1000M-Base-Ethernet×4, USB3.0×4, 12V×4, 5V×1, 24V×4, BAT×1 |
|
Specifications
|
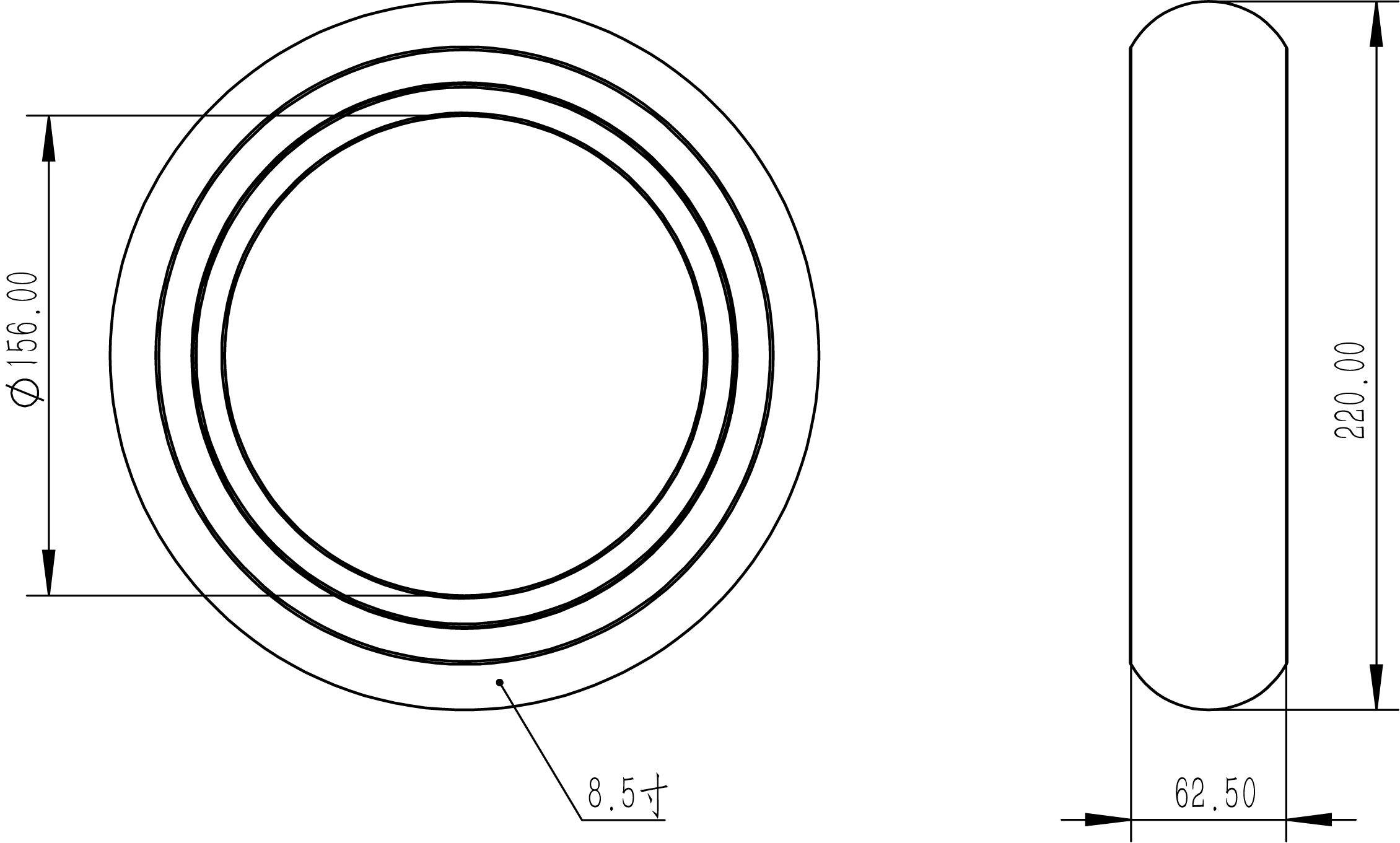
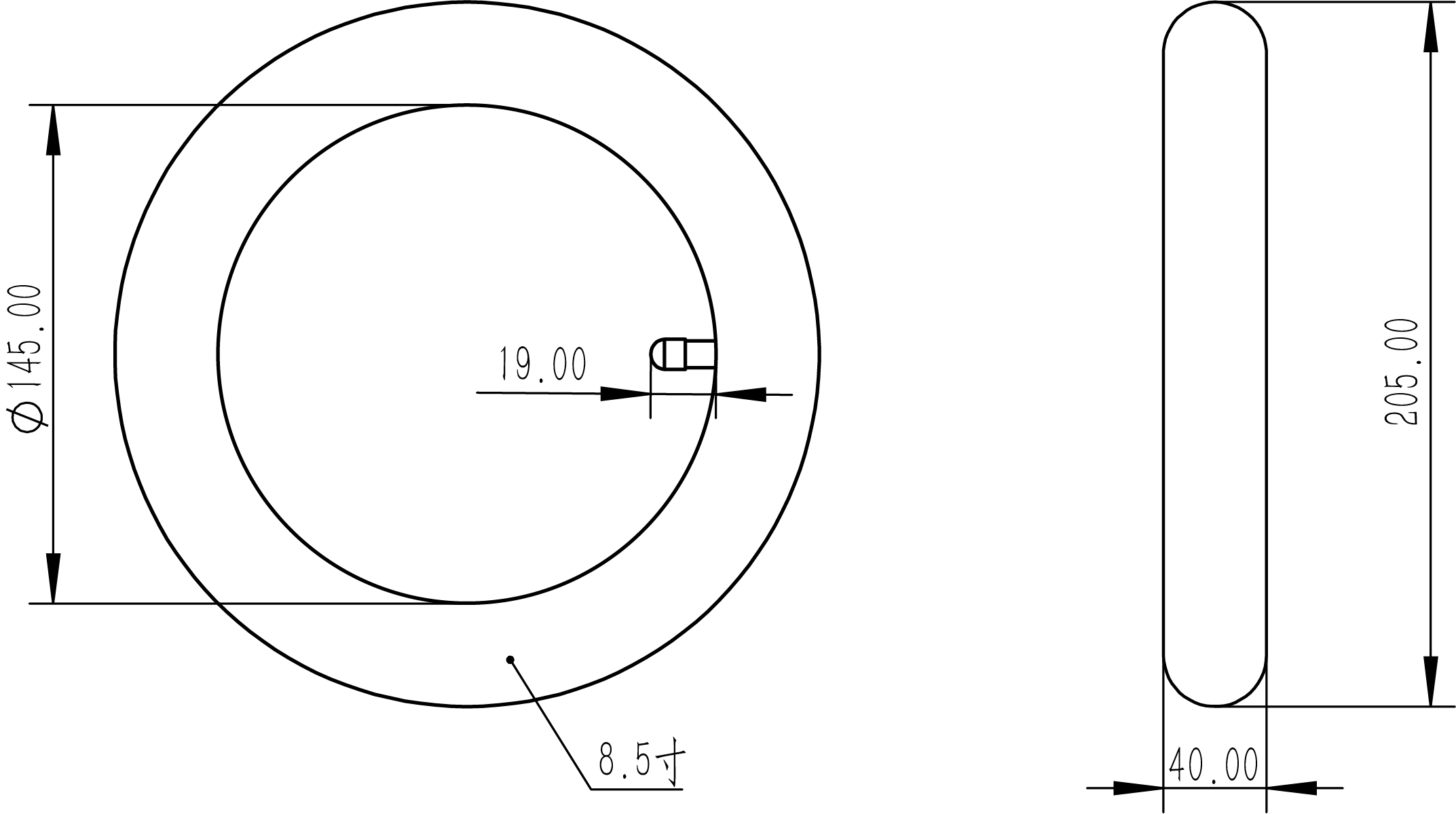
Tire pressure
|
|---|---|
| 8.5 inches | 2.4 |
Join Our Journey
Our products solve real problems with clean design and honest materials.Get exclusive deals and early access to new products.